

Сегодня мы рассмотрим один из вариантов создания CAD-модели лопатки винта в программе Geomagic Design X. Поскольку задача проста и требуется только получение набора сечений пера лопатки, процесс работы будет довольно быстрым. Для начала отсканируем саму лопатку, используя в нашем случае 3D-сканер Handyscan 700 (рис. 1).
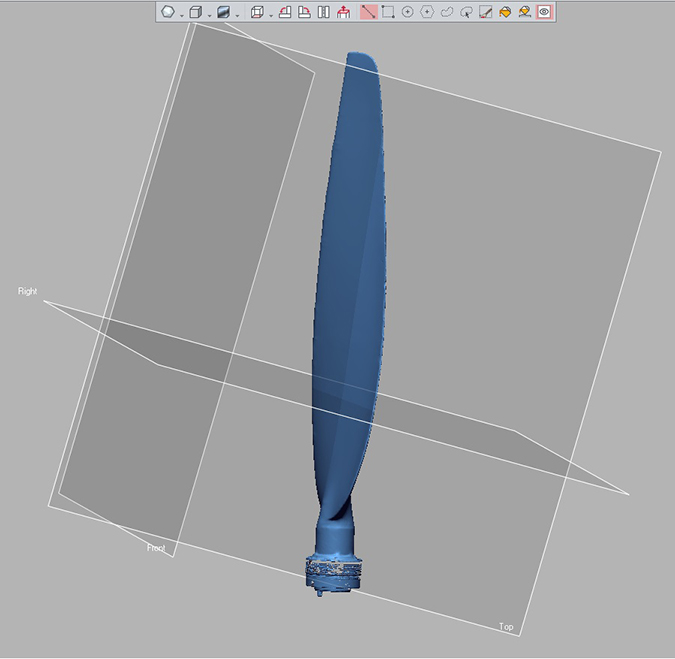
Рис. 1. Полигональная модель лопатки
Первый шаг, который нам потребуется сделать, это создать в Geomagic Design X новую систему координат (любой сканер строит систему координат относительно своего расположения, что в большинстве случаев нам не подходит. В то же время от правильного выбора системы зависят и удобство работы, и правильность построения модели). Geomagic Design X предлагает несколько способов построения системы координат, самый простой из которых – автоматическое определение. Для выполнения этой функции нам прежде всего понадобится определить на модели все базовые элементы: плоскость, цилиндр, сферу, тела вращения и произвольные поверхности. Найденные элементы маркируются на модели разными цветами и выглядят так, как это показано на рис. 2.
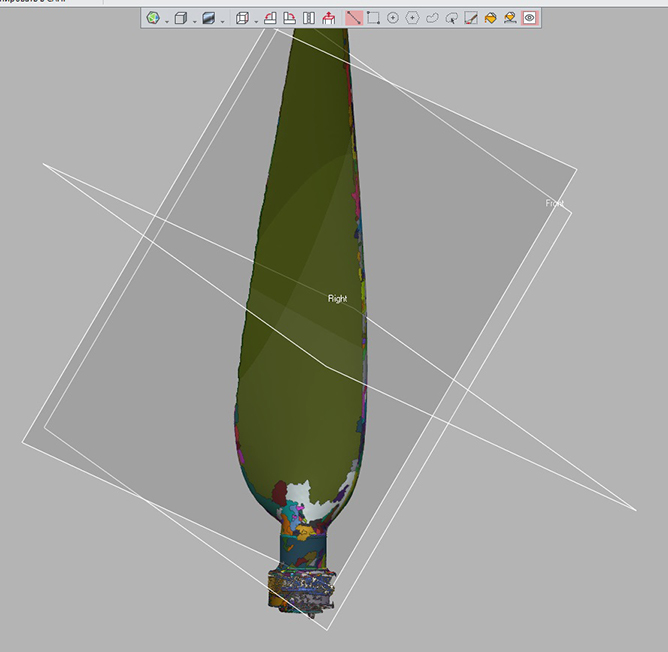
Рис. 2. Определение базовых элементов
На основе базовых элементов программа Geomagic Design X сможет самостоятельно определить оптимальное расположение системы координат относительно модели. Она предложит на выбор несколько вариантов и, после того как мы укажем наиболее подходящий, автоматически выставит объект в этой системе (рис. 3).
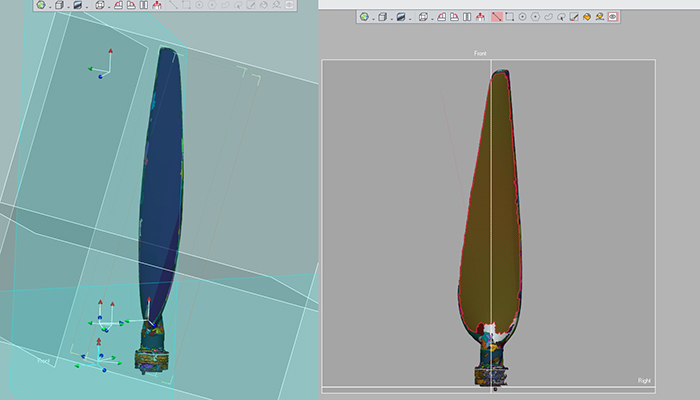
Рис. 3. Создание новой системы координат
Далее можно приступать непосредственно к созданию CAD-модели. Начнем мы с основания лопатки – его построение не представляет большой сложности: это тело вращения, и для его создания нам требуется сделать сечение модели по одной из осей, в данном случае по оси Z. Программа сформирует 2D-эскиз, в котором отмечены границы нашей полигональной модели. По полученному сечению выполним отрисовку основания лопатки (рис. 4).
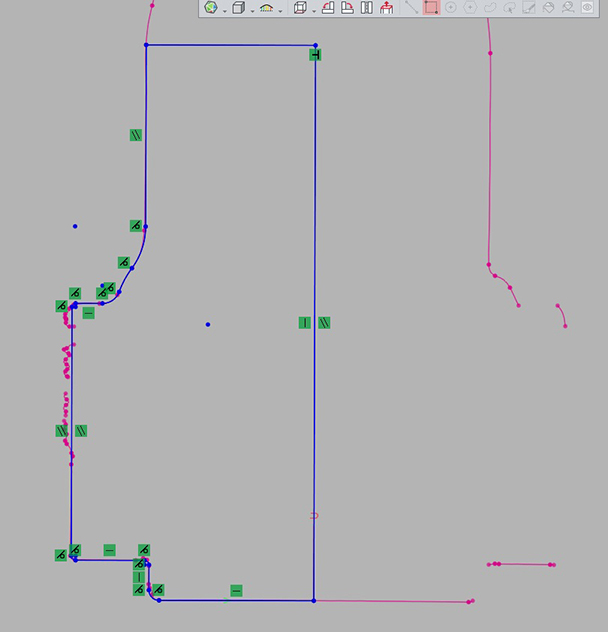
Рис. 4. Отрисовка основания лопатки по 2D-эскизу
В рамках нашей задачи построение основания лопатки единым телом вполне приемлемо, так как нам требуется общее представление о его расположении относительно пера лопатки. В противном случае пришлось бы строить основания из трех отдельных цилиндров разного диаметра. На следующем этапе создаем тело, используя функцию вращения сечения вокруг оси (рис. 5).
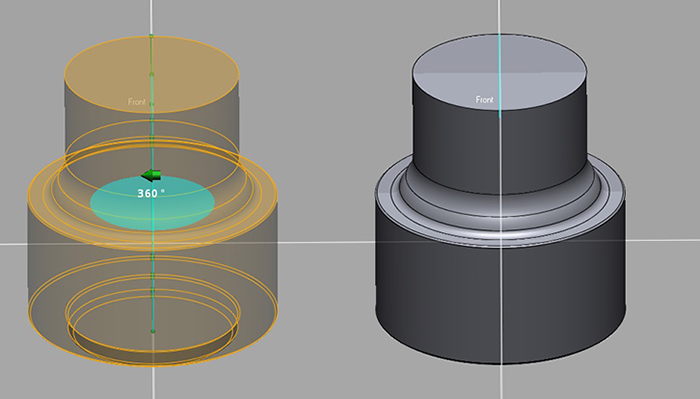
Рис. 5. Создание CAD-модели
Поскольку основание уже создано, мы можем теперь создать сечения для пера лопатки в правильном (перпендикулярном) расположении относительно этого основания. Создаем линейный массив из поверхностей верхней части основания (рис. 6).
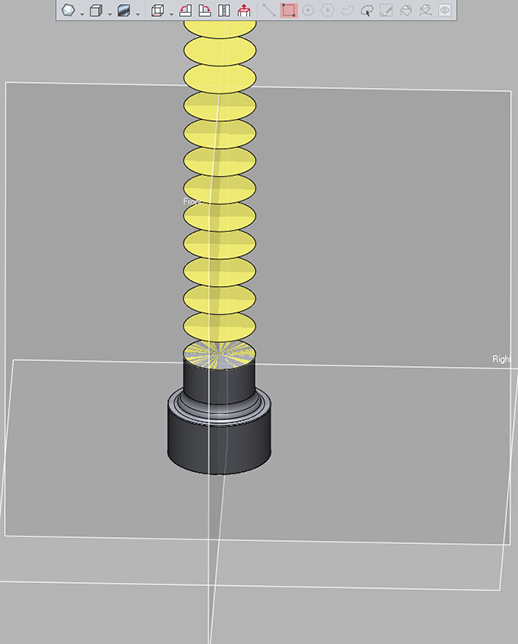
Рис. 6. Построение массива плоскостей
Расстояние между поверхностями массива составляет 25 мм. На основе построенных поверхностей создаем сечения по полигональной поверхности пера лопатки (рис. 7) – здесь при отрисовке мы воспользуемся функцией Spline, значительно упрощающей процесс работы.
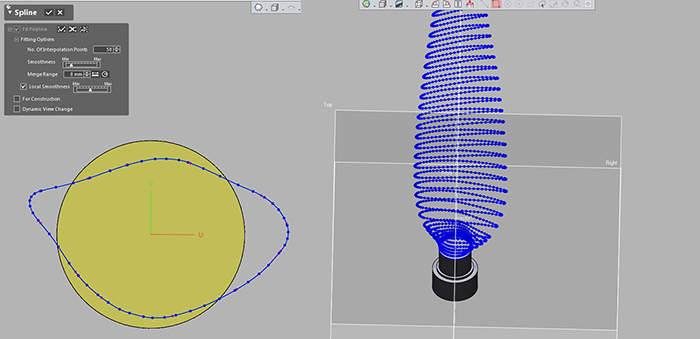
Рис. 7. 2D-сечения пера лопатки
После этого полученные сечения и твердое тело можно экспортировать в формат STP или любой другой из поддерживающихся CAD-системами. Одна из функций Geomagic Design X – LiveTransfe – обеспечивает возможность интерактивной передачи модели (рис. 8), в том числе и в самые популярные CAD-системы. Заметим, что одновременно с моделью будет передано дерево ее построения – это упростит последующую обработку/доработку модели в удобной для вас CAD-системе.
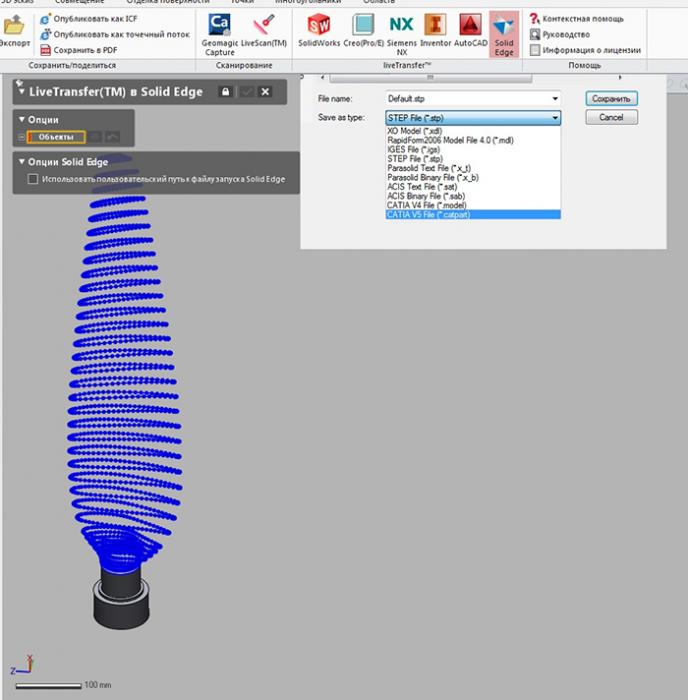
Рис. 8. Экспорт CAD-модели




